Set up of Open Rowing Monitor
This guide roughly explains how to set up the rowing software and hardware.
Requirements
- A Raspberry Pi that supports Bluetooth Low Energy. Probably this also runs on other devices.
- Raspberry Pi Zero W or WH
- Raspberry Pi Zero 2 W or WH
- Raspberry Pi 3 Model A+, B or B+
- Raspberry Pi 4 Model B
- An SD Card, any size above 4GB should be fine
- A rowing machine (obviously) with some way to measure the rotation of the flywheel
- with a build in reed sensor that you can directly connect to the GPIO pins of the Raspberry Pi
- if your machine doesn’t have a sensor, it should be easy to build something similar (magnetically or optical)
- Some Dupont cables to connect the GPIO pins to the sensor
Software Installation
Initialization of the Raspberry Pi
- Install Raspberry Pi OS Lite on the SD Card i.e. with the Raspberry Pi Imager
- Configure the network connection and enable SSH, if you use the Raspberry Pi Imager, you can automatically do this while writing the SD Card, just press
Ctrl-Shift-X(see here for a description), otherwise follow the instructions below - Connect the device to your network (headless or via command line)
- Enable SSH
Installation of the Open Rowing Monitor
Connect to the device with SSH and initiate the following command to set up all required dependencies and to install Open Rowing Monitor as an automatically starting system service:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/laberning/openrowingmonitor/HEAD/install/install.sh)"
Updating to a new version
Open Rowing Monitor does not provide proper releases (yet), but you can update to the latest development version with this command:
updateopenrowingmonitor.sh
Running Open Rowing Monitor without root permissions (optional)
The default installation will run Open Rowing Monitor with root permissions. You can also run it as normal user by modifying the following system services:
To use BLE and open the Web-Server on port 80
Issue the following command:
sudo setcap cap_net_bind_service,cap_net_raw=+eip $(eval readlink -f `which node`)
To access ANT+ USB sticks
Create a file /etc/udev/rules.d/51-garmin-usb.rules with the following content:
ATTRS{idVendor}=="0fcf", ATTRS{idProduct}=="1008", MODE="0666"
ATTRS{idVendor}=="0fcf", ATTRS{idProduct}=="1009", MODE="0666"
Hardware Installation
Basically all that’s left to do is hook up your sensor to the GPIO pins of the Raspberry Pi and configure the rowing machine specific parameters of the software.
Open Rowing Monitor reads the sensor signal from GPIO port 17 and expects it to pull on GND if the sensor is closed. To get a stable reading you should add a pull-up resistor to that pin. I prefer to use the internal resistor of the Raspberry Pi to keep the wiring simple but of course you can also go with an external circuit.
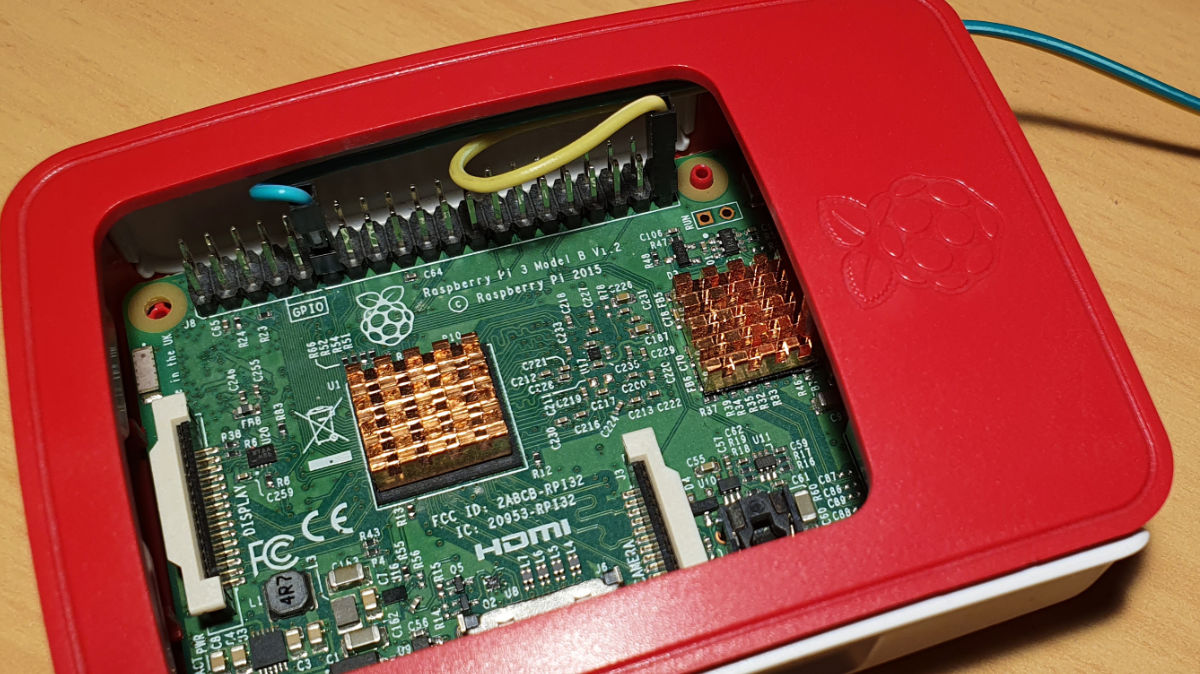 Internal wiring of Raspberry Pi
Internal wiring of Raspberry Pi
The internal pull-up can be enabled as described here. So its as simple as adding the following to /boot/config.txt and then rebooting the device.
# configure GPIO 17 as input and enable the pull-up resistor
gpio=17=pu,ip
How to connect this to your rowing machine is specific to your device. You need some kind of mechanism to convert the rotation of the flywheel into impulses. Some rowers have a reed sensor for this built-in, so hooking it up is as simple as connecting the cables. Such a sensor has one or more magnets on the wheel and each one gives an impulse when it passes the sensor.
 Connecting the reed sensor
Connecting the reed sensor
For a specific hardware-setup, please look at:
If your machine isn’t listed and does not have something like this or if the sensor is not accessible, you can still build something similar quite easily. Some ideas on what to use:
- Reed sensor (i.e. of an old bike tachometer)
- PAS sensor (i.e. from an E-bike)
- Optical chopper wheel
Rower Settings
You should now adjust the rower specific parameters in config/config.js to suit your rowing machine. Have a look at config/default.config.js to see what config parameters are available.
Also check the Guide for rower specific settings.